图解电机原理
发布时间:2024/12/4 10:18:00 来源:永阜康科技
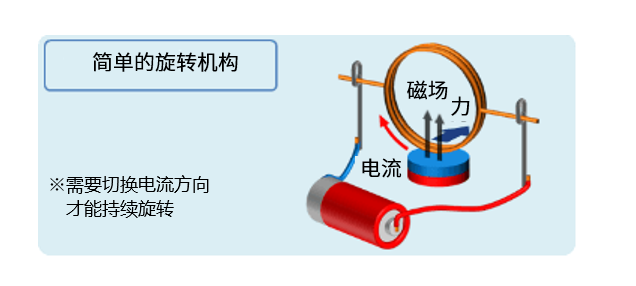
从广义上讲,“电机(mortor)”是一种动力装置,比如在赛车运动等与汽车相关的英文术语中也会用到,这里所讲的“电机”是指将电能转换为机械能的“电动机”。电机是利用电能形成电磁体,并利用磁体的相互作用(引力和斥力)产生机械能。还有另外一种解释思路,也许这种解释更通用,也可以说电机“利用了通电导体在磁场中的受力”。这就涉及到“弗莱明左手定则”。我们可以用下面的简单旋转机构示意图来具体了解这个原理(注:需要切换电流方向才能持续旋转)。不过它的结构与后续将要介绍的实际电机结构略有不同,因此,在这里我先来大致讲解一下“电磁体的应用”。
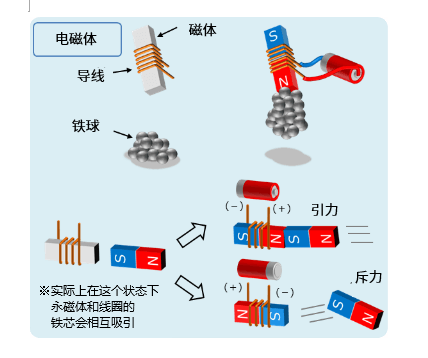
电磁体是在铁等磁性材料上缠绕导线而制成的。当然,只是这样缠绕并不会发生什么,但是当电流流过导线时,磁性材料就会拥有磁铁的特性,会吸引其他磁体(铁等)。另外,由于可以通过改变电流的方向来改变磁极,因此如果在一个磁体的对面配置另一个磁体,那么施加在该磁体上的力就可以在引力和斥力之间切换(参见下图)。
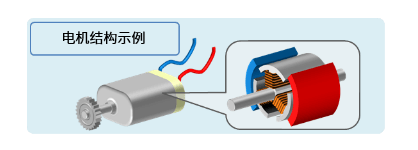
所谓的电机,就是基于这种电磁体特性,利用电能实现旋转运动的(注:也有线性电机等做直线运动的电机)。现在,相信您已经明白了机械能是通过磁体的相吸与相斥的力而获得的,那么,持续的旋转运动是如何实现的呢?关于这一点,只要看看无线遥控汽车和电子制作等作品中使用的电机的结构,其实很容易理解。下面我们以基本的有刷电机为例,来了解一下电机的旋转原理。
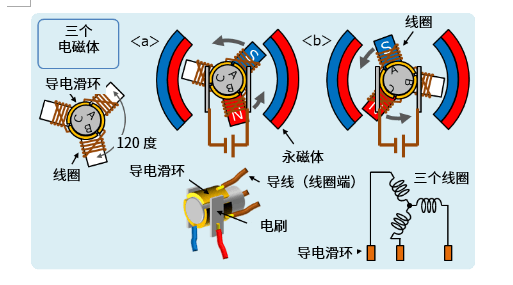
这种电机的结构如“三个电磁体”图所示,由以120度的间隔机械排列的线圈和导电滑环、夹着导电滑环配置的两个电刷、以及永磁体组成。这种电机由于具有电刷而被称为“有刷电机”、“换向器电机”或“整流子电机”。
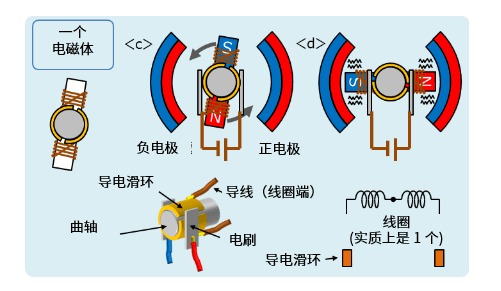
为了方便大家了解为什么是这种120度夹角的结构,我们先用一个电磁体的示意图来说明其旋转原理。
在“一个电磁体”图中,有两个电刷,一个接正电极,一个接负电极。如图所示,当用电刷夹住导电滑环时,电压会施加在与滑环相连的线圈上,从而使电流流过。该导电滑环安装在电机的曲轴上,与线圈(电磁体)一起旋转。以这种结构为基础,例如当图中位置有线圈时,通过调整配置导电滑环的位置,使电流流过,从而使电磁体的磁极成为如图所示的磁极。这样,在线圈中就会产生逆时针方向的力,从而能够使电机旋转起来。接下来,我们来看看该线圈通过旋转到达 位置时的情况。在这个位置,如果电磁体的极性保持不变,那么线圈就会停止,所以需要在这个位置改变电磁体的极性。微调导电滑环的位置,使电刷和滑环的连接正好在这个位置反接,这样就能够使电机保持持续旋转。然而,如果仔细观察,您会注意到这种结构的难点。例如,实际上很难在正好的时间点在位置切换电极,如果在这里电极切换出现问题,电机就会停转。另外,一个导电滑环和两个电刷之间的接触可能会导致正极和负极之间短路,从而引发故障。为了解决这些问题,设计师们想到了使用三个线圈、并将电磁体以120度的间隔进行配置的结构。这种结构的电机被称为“三相电机”,示例中的电机就是这种电机。顺便提一下,由一个电磁体组成的电机被称为“单相电机”。前面的“三个电磁体”图是三相电机结构示意图。其线圈有三个,每个线圈的一端与导电滑环相连,另一端则将三个线圈连起来。通过这样的接线方式,用电刷给两个导电滑环施加电压,使两个线圈被磁化。这样,比如在位置,A线圈和B线圈被磁化,在位置,在处变为N极的B线圈被消磁,而C线圈变为N极。如果是这样运转,就不会出现“一个电磁体”图中的情况。而且,采用这种导电滑环配置方式,正极和负极之间不会短路。
综上所述,电机是通过在适当的时间点切换电磁体的极性来实现旋转的。
| |
| |
 |
您可能对以下产品感兴趣 |
 |
|
 |
| 产品型号 |
功能介绍 |
兼容型号 |
封装形式 |
工作电压 |
备注 |
| ACM6731 |
ACM6731 是一款三相无刷直流电机驱动芯片,内部集成 无感三相无刷电机驱动算法、相电流检测电流电路、栅极驱动电路以及功率MOS管. 支持最大2.4A的相电流. ACM6731的高集成度以及精简外围特别适用于高功率密度、小尺寸、静音要求高的三相无刷电机驱动器应用场景. |
|
SOP-8 |
2.7V-16V |
2.7V-16V、2.4A峰值相电流、三相直流无刷电机驱动器 |
| ACM6732 |
ACM6732是一款三相无刷直流电机驱动芯片,内部集成无感三相无刷电机驱动算法、相电流检测电流电路、栅极驱动电路以及功率MOS 管. 支持最大2.4A的相电流. ACM6732 的高集成度以及精简外围特别适用于高功率密度、小尺寸、静音要求高的三相无刷电机驱动器应用场
景. |
|
DFN-10 |
2.7V-16V |
2.7V-16V、2.4A峰值相电流、 三相直流无刷电机驱动器 |
| ACM6755 |
ACM6754是一款三相无刷直流电机驱动芯片,内部集成无感三相无刷电机驱动算法、相电流检测电流电路、栅极驱动电路以及功率MOS管. 支持最大4.8A的相电流. ACM6754/55 的高集成度以及精简外围特别适用于高功率密度、小尺寸、静音要求高的三相无刷电机驱动器。 |
ACM6763 |
QFN-28 |
4.5V-28V |
三相180˚ 正弦/方波, 无感或者外置霍尔的直流无刷电机驱动器, 180˚ 正弦/方波/开窗正炫可选 |
| ACM6763 |
4.5V-32V、5A三相无刷无感驱动、180˚正弦,集成驱动算法+预驱+MOS |
ACM6755 |
QFN-28 |
4.5V-32V |
三相180˚ 正弦, 无感或单霍尔,车规级无刷电机驱动 |
| ACM6754 |
ACM6754是一款全集成、无需外置传感器的三相无刷电机驱动IC。内部集成电机控制算法和电流/ 电压检测,能够基于无刷电机旋转过程中的反电动势控制电机静音/ 高效旋转。 |
ACM6753 |
QFN-24 |
5V-28V |
三相180˚ 正弦/方波, 无感或者外置霍尔的直流无刷电机驱动器 |
| ACM6252 |
ACM6252是一款外置霍尔传感器的单相无刷电机驱动IC。内部集成电机控制算法和电流检测,能够基于霍尔信号控制单相无刷电机静音/ 高效旋转。内部集成4颗小于500mΩ的MOS保证1.2A电流输出的情况下优异的热性能。 |
APX9230/M8121 |
TSSOP-16/DFN-10 |
3.3V-18V |
正弦波或方波驱动,外置霍尔的12V/1.2A单相无刷直流电机驱动器 |
| ACM6753 |
18V、3A三相无刷无感驱动、180˚正弦,集成驱动算法+预驱+MOS |
ACM6754 |
QFN-24 |
5V-18V |
5-18V无感三相无刷电机驱动器 |
|
| |