


电机浪涌电流为何这么高?
尽管人们普遍理解这一事实,但这一事实似乎与常识相悖:运动速度越慢(随着时间的推移完成的工作越少),消耗的能量就越少,因此功耗就越低。固定电压源的功率越低,电流消耗就越低。甚至与扭矩、功率和 RPM 相关的常用公式也指出:
功率 = 扭矩 ( au) imes RPM
这个等式似乎也将低 RPM 与低功耗关联起来。
使用这些基础物理方程,似乎很难证明浪涌电流为何如此之高这一明显可测量的现实原因。
电机线圈阻抗
在任何电机中,一个部件都会移动,而另一个部件则保持静止。在大多数电机中,这意味着中心轴是转子(旋转),而外壳保持静止(定子)。在许多无刷电机中情况并非如此,因为外部会旋转;不过,本文将主要讨论感应电机。
构成定子绕组的线圈缠绕在铁磁极上。这会产生一个 RL 电路,其中有一些是导线本身的电阻,还有线圈形成的自然感应。当电压施加到导线上时,磁场作用于铁磁金属并产生电抗(阻碍电流流动)。
图 2.定子绕组围绕铁极的三相电动机。
这里,我有一个电机,接线为三相 480 V 输入,T 型引线之间测量到 16.5 Ω 的电阻。此 ? HP 电机的 FLA(安培)额定值为 480 V 时 1.5 A。这相当于总阻抗为 320 Ω,远高于线圈本身的 16.5 Ω 电阻。
这种额外的阻力是由于电动机的感抗(包括定子和转子)造成的。
我们怎么知道的?如果阻抗仅由定子的绕组和极点引起,那么停止和运行的电机之间就没有区别了。随着电机加速,电阻(和电抗)增加,因此电流相反地减少。
测量 480 伏 T 型引线之间电机绕组的电阻
图 3.测量 T 型引线之间的电机绕组电阻,配置为 480 V。
反向电压或反电动势
当电机全速运转时,电感器上会施加负载,导致电感器消耗能量来反转转子铁芯层压层的极性。换句话说,它必须消耗更多的能量来同时旋转轴和极化金属。
负载效应也可以用小型直流电机来演示:在保持导线断开(无负载)的情况下旋转轴,它就会轻松旋转。在导线上连接一个灯泡或电阻器,轴的旋转就会变得更加困难。当磁场产生能量并将其转化为光、热或运动时,它会产生巨大的阻力。
在感应电动机中,该反电动势 (EMF) 提供了足够的阻力,可将电流从极高的启动值降至全速时的标称“满载”安培。
另一个常见的类比是观察变压器在空载和满载条件下的效果。当没有连接负载时,几乎不需要用力就能使铁芯极化,电源电流会很高。当连接可变负载并缓慢增加时,负载电流会下降,电源电流也会下降。
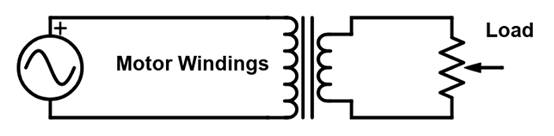
图 4.变压器类比电机负载效应。
个问题:空载电机是否应该具有更高的电流?
如果增加负载确实会增加反电动势,那么断开负载的自由旋转电机是否应该具有更高的电流,并且可能烧断电源保险丝和断路器?
当消耗能量来移动负载时,这被称为功率。如果电机空载,产生的功率就很小。转子肯定有反电动势,但电机的功率要求要低得多。由于功率等于:
[电压 乘以电流 ]
...并且主电源的电压保持相对不变,电流就会较低。
因此,空载电机的电流会降低,因为电机所需和产生的功率较低。负载电机的电流会降低,因为较重的负载会产生反电动势。
然而,在这两种情况下,通常空载电机消耗的电流比负载下的同一电机要少。
第二个问题:高电流是由于加速度还是仅仅是 RPM 引起的?
在物理运动学课程中,常用方程式如下:
[力 = 质量 乘以加速度 ]
...或者...
[F = M 乘以 A]
如果没有加速(或恒定运动),则不需要额外的力,因此应尽量减少功率。因此,如果电机停止,电流应该很小。只有电机加速时的短暂时刻才会是高浪涌电流期。
然而,任何处理过堵转电机(或转子锁定)电流的电工都知道,停止的电机仍然会消耗大量电流并导致故障。这证明,虽然加速需要更多功率并会增加电流,但转子的速度(而不是加速度)对电流消耗的影响必须很大。
电机电流故障
大多数情况下,这种高启动电流是预料之中的,也是正常的。许多电机启动装置都有断路器曲线,允许短时间内产生高电流,同时消耗在电机和负载上。
修复故障电机是一个耗时且昂贵的过程。了解这些高电流情况发生的方式、时间和原因有助于降低这些常见问题的成本和危害。
|
||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||