


无刷直流电动机 (BLDC),也称为电子换向电动机(ECM、EC 电动机)或同步直流电动机,是由直流电通过逆变器或开关电源供电的同步电动机,该同步电动机会产生交流电流来驱动各相通过闭环控制器控制电机。控制器向控制电机速度和扭矩的电机绕组提供电流脉冲。
与有刷电机相比,无刷电机的优势在于高功率重量比、高速度和电子控制。无刷电机在计算机外围设备(磁盘驱动器、打印机)、手持电动工具以及从模型飞机到汽车的车辆等地方都有应用。
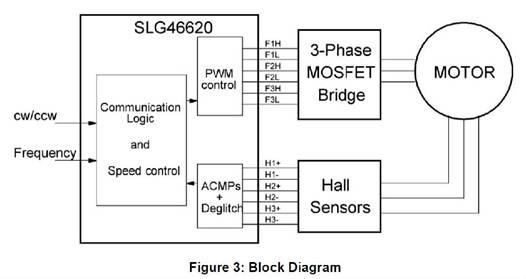
该项目描述了如何使用 GreenPAK? 控制三相无刷直流电机。
下面我们描述了了解解决方案如何编程以创建直流电机控制所需的步骤。但是,如果您只是想得到编程的结果,XZGreenPAK Designer 软件查看已经完成的GreenPAK Design 文件。将GreenPAK 开发套件插入您的计算机,然后点击程序来设计设备。
构造和运行原理
BLDC 电机的结构和操作与交流感应电机和有刷直流电机非常相似。与所有其他电机一样,BLDC 电机也由转子和定子组成(图 1)。
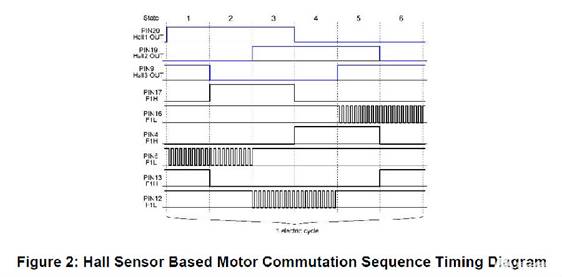
BLDC 电机定子由叠层钢制成,用于承载绕组。定子中的绕组可以按两种模式排列 - 星形图案 (Y) 或三角形图案 (Δ)。两种模式之间的主要区别在于 Y 模式在低 RPM 时提供高扭矩,而 ? 模式在低 RPM 时提供低扭矩。这是因为在 ? 配置中,一半的电压施加在未驱动的绕组上,从而增加了损耗,进而增加了效率和扭矩。BLDC 电机使用电气循环进行控制。一个电循环有 6 个状态。基于霍尔传感器的电机换向序列如图 2 所示。
BLDC 电机运行的基本原理与有刷直流电机相同。对于有刷直流电机,反馈是使用机械换向器和电刷实现的。在 BLDC 电机中,使用多个反馈传感器实现反馈。Z常用的传感器是霍尔传感器和光学编码器。
在三相 BLDC 中,齿(极)数是 3 的倍数,磁铁数是 2 的倍数。 根据磁铁和齿的数量,每个电机具有不同数量的齿槽效应(即磁吸力)转子和定子)每转步数。要计算步数 (N),我们需要知道电机中使用了多少个齿和多少个磁铁。该项目中使用的电机有 12 个齿(极)和 16 个磁铁。
因此,要转动 1 圈,我们需要生成 48 个电步。
设计
该设计有 2 个输入来控制电机速度和方向。PIN#8 控制方向;Pin#8 上的高电平表示电机顺时针旋转,低电平表示逆时针旋转。PIN#2 用于通过输入频率控制速度。此引脚上没有频率信号将关闭驱动器,电机将停止。在前 500 毫秒内向该引脚施加频率将启动电机。使用输入频率使我们能够非常JQ地控制电机速度。要计算 RPM,我们需要知道电机包含多少个电步:
此应用中的电机有 48 步,因此在 5kHz 的频率下,电机将以 6250 RPM 运行。
该设计可分为 4 个部分(图 5):霍尔传感器的处理块、栅极驱动器块、PWM 控制或速度控制块以及保护块
霍尔传感器的处理模块包括 ACMP(ACMP0、ACMP3、ACMP4)、去毛刺滤波器(DLY1、DLY5、DLY6)和 DFF(DFF6、DFF7、DFF8)。本项目中使用的霍尔传感器有 4 个引脚;VDD、GND 和 2 个连接到 ACMP 的 IN 和 IN- 输入的差分输出。内部 Vref 组件设置为 1.2 V,用作霍尔传感器的 VDD。来自 ACMP 的滤波信号进入 DFF 的 D 输入。输入频率为这些 DFF 提供时钟并设置旋转速度。来自这些 DFF 的信号进入栅极驱动器和配置为 XNOR 的 3 位 LUT14。结果是每次任何霍尔传感器改变其极性时,输出电平都会交替变化。两个边沿检测器都会生成实际速度频率(霍尔频率),将其与输入频率进行比较以生成 PWM 信号来控制旋转速度。
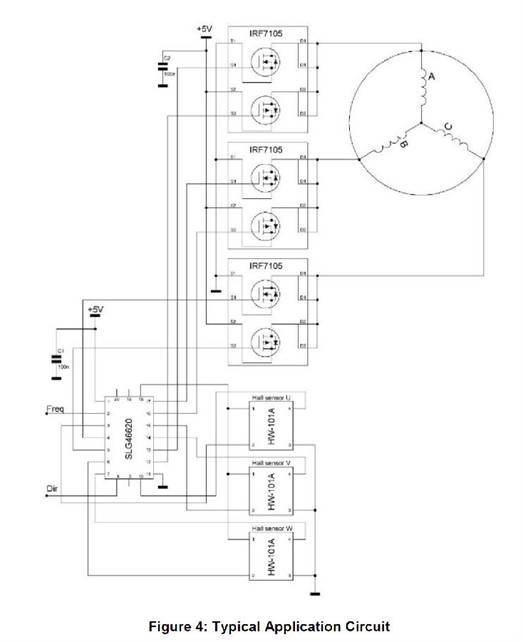
栅极驱动器模块包括 12 个 3 位 LUT,可根据霍尔传感器的反馈对外部晶体管进行换向。其中 6 个 LUT(3 位 LUT8 – 3 位 LUT13)用于 CW 方向,另外 6 个(3 位 LUT1 – 3 位 LUT6)用于切换到 CCW 方向。该模块还包括 3 个 2 位 LUT(2 位 LUT4、2 位 LUT5 和 2 位 LUT6),用于将每相 PMOS 晶体管的信号与 PWM 混合,以确保转速与负载无关。
PWM 控制包括 PWM2 组件、计数器 CNT8、有限状态机 FSM1、3 位 LUT15、2 个 DFF(DFF0 和 DFF1)、上升沿检测器 PDLY0 和反相器 INV0。DFF0 和 DFF1 一起用作频率比较器;当输入频率高于霍尔频率时,DFF0 nQ 输出变为低电平;当输入频率低于霍尔频率时,DFF1 nQ 输出变为低电平。在“ ”输入为低电平时,PWM2 OUT 输出将生成占空比范围为 256/256 至 1/256 的 PWM 信号。在“-”输入为低电平时,PWM2 OUT 将生成占空比从 1/256 变化到 256/256 的 PWM。PWM 频率约为 100 kHz,启动时 IC 的占空比设置为 0%。电机停止,直到施加到 PIN2 的输入频率。将频率应用到 PIN2 后,DFF0 nQ 输出将变低,PWM 会将占空比从 0 增加到 99.6%。电机将继续旋转,直到霍尔传感器超过输入频率。此时,DFF0 nQ 输出将变为高电平,而 DFF1 nQ 输出将变为低电平。这种反转会导致 PWM 占空比在电机上看到的即时 VDD 和负载处降低到可接受的值。该系统将不断工作以平衡 PWM 占空比。FSM1、CNT8、3 位 LUT15 和 PWM2 的功能在 这种反转会导致 PWM 占空比在立即 VDD 和电机负载处降低到可接受的值。该系统将不断工作以平衡 PWM 占空比。FSM1、CNT8、3 位 LUT15 和 PWM2 的功能在 这种反转会导致 PWM 占空比在电机上看到的即时 VDD 和负载处降低到可接受的值。该系统将不断工作以平衡 PWM 占空比。FSM1、CNT8、3 位 LUT15 和 PWM2 的功能在应用笔记 AN-1052。
保护块包括 2 个延迟(DLY2 和 DLY9)、计数器 CNT0 和配置为 XOR 门的 2 位 LUT0。这部分设计用于保护电机和外部 FET 不被烧坏。如果电机卡住或无法启动,霍尔传感器将无法提供关闭电机所需的反馈。如果在 100 毫秒后没有收到反馈,DLY2 输出将变为低电平并且 2 位 LUT0 关闭电机。如果发生这种情况,CNT0 和 DLY9 会尝试每 500 毫秒启动YC电机,持续 8 毫秒。这段时间足以启动电机,但不足以对电机造成损坏。
结论
该项目描述了如何使用SLG46620 GreenPAK IC和霍尔效应传感器控制三相无刷直流电机。SLG46620 还包含可用于该项目的其他功能。例如,GreenPAK 中的 ADC 可以解释输入直流电压并根据该值生成 PWM 脉冲,而不是使用输入频率。
以前,如果设计人员希望控制 BLDC 电机,他们将受到电气规格和专用现成 IC 解决方案功能的限制。这迫使设计人员选择功能固定且可能会过度杀伤或昂贵的解决方案,这通常会限制其系统的 IO。
Dialog GreenPAK 通过将可配置性重新交到设计人员手中,逆转了这一设计过程。通过将此 GreenPAK 应用程序用作普遍适用(尽管也是WY可配置的)三相 BLDC 电机控制方案,设计人员可以选择满足其项目独特电气规格的引脚分配和外部 FET。此外,即使考虑到外部 FET,Dialog GreenPAK 解决方案。
|
||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||