


如今,激光雷达已被广泛应用于机器人、无人驾驶、AR/VR、3D 打印等多个领域,根据应用领域的不同,激光雷达的类型也存在一定差异,机器人是目前激光雷达应用最为火热的领域之一,按照不同的技术路线,可将机器人激光雷达分为 TOF 激光雷达及三角测距激光雷达两大类型。
TOF 激光雷达
TOF 激光雷达是一种进行光飞行的时间的测量方法,顾名思义就是发射出一道激光,然后会有一种二极管来进行激光的回波检测,再使用一个很高精度的计时器去测量光波发射到目标物引起反馈再回来的时间差,而光速具有不变性,再将时间差乘以光速便可得到目标物体的距离。
对于 TOF 的测距原理,如果再加以细分,还可再分为脉冲式及相位式两种。
脉冲式比较简单直接,就是发出一道激光的脉冲,然后再检测激光的相关信息。这个是目前 TOF 激光雷达采用的主流方式。
相位式则是连续的发射激光。但是接收到的回波信号会由于光速传播的特性,相位上会有差距。当检查相位时就可以转过来处理这个距离。这种方式的优势在于成本相对更低,但其主要问题是测量的速度没法提高。

现下较热的 RPLIDAR S1 激光雷达便采用了脉冲式 TOF 测距原理,其配合思岚科技研发的高速激光采集处理机构,能进行每秒 9200 次的测距动作,在测距过程中,RPLIDAR S1 将发射经过调制的红外激光信号,该激光信号在照射到目标物体后产生的反光将被 RPLIDAR S1 的激光采集系统接收,然后经过嵌入在 RPLIDAR S1 内部的 DSP 处理器实时解算,被照射到的目标物体与 RPLIDAR S1 的距离值以及当前的角度信息将从通讯接口中输出。

基于 TOF 原理的 RPLIDAR S1 激光雷达,目前可实现 40 米的测距距离,同时也是业内体积最小的激光雷达之一,即使在远距离物体条件下,这款 TOF 激光雷达也能保证测量的精度不发生改变,同时在室外及更大场景中,其性能依旧稳定。
三角测距激光雷达
三角测距激光雷达是一种基于图像处理的方法,就像我们给人拍照,人距离相机的远近会决定 TA 在成像里的大小,这就是三角测距的一种原理应用。像 connect 体感摄像头,Intel 研发的 RealSense 都会使用到三角测距法,三角测距法采用了一种特制的摄像头,能拍摄出激光的光斑的特性,从而能反推出距离。
相比 TOF 激光雷达,三角测距激光雷达的成本会有很大降低,本质上来说就是一个摄像头加一个处理芯片。当然三角测距激光雷达也有一些缺点,它会有分辨率的限制,如分辨率不高,物体又较远,可能会出现看不清的情况,同理,三角测距法对于远距离的物体来说,便会看的不是很清楚,所以对算法具有很高挑战。如果算法不够优秀,即使测量四五米开外的物体就会出现问题。

上表是详细对比,实际上来说,TOF(Time of Flight)方法在性能上比较占优,但成本相对更高。而三角测距法则相反,在成本上,它是一种非常占优的方案。但是其缺点在于如果软件的复杂度不够高,在进行远距离的测量的时候,性能就会下降得特别快。
下图可作为具体解释:
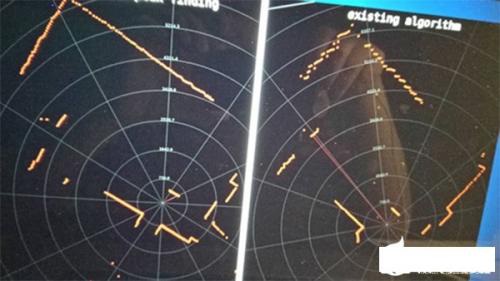
我们看到,在这个画面中,右边这张图显示的就是,算法写的不好或者是说比较传统的激光雷达,它在测量远距离的物体时,明明应该是一个笔直的墙体,但是它扫描出来的效果就会有很多类似锯齿状的马赛克的感觉,给后期的算法处理上带来了很多障碍。
而左图是思岚科技使用的算法。该算法能使激光在远距离情况下依旧做的非常远,实际上三角测距的激光雷达存在的一个主要的制约技术门槛,就在于算法的优秀性。经过长时间的迭代优化,目前思岚科技的 RPLIDAR A3 三角测距激光雷达已能达到 25 米的测距范围,突破了曾经业内曾认为三角测距雷达因为自身原理难以突破 20 米以上的实用化测距。另外,在实现了 25 米范围的实用化测距的同时,还能做到每秒高达 16,000 的采样频率,及 0.33°(15hz 情况)的角度分辨率。
|
||||||||||||
|
||||||||||||