


电机驱动器文化崛起刚刚几年,我很自然地认为大部分人都不熟悉机电控制系统。为此我召开了几次座谈会,这真是有点费劲的事情。
但是我认为我有义务就这个话题培训其他人,因为我很少看到高校课程除了简单介绍控制理论之外再做其它讲解。我的目标是深入浅出地介绍无刷直流电机。
所有电机都有个概念叫做“换向”,说的是切换电流(用某种方式)以便移动物理转轴的过程。当电流流经线圈时转轴就会移动,从而产生磁场(一般来说,是由永磁体产生的),这个磁场与原有磁场可能相斥,可能相吸。该力导致转子(电机的运动部分)相对于定子(电机的静止部分)而言发生运动。
磁体是换向的一个很好的类比。当把两个磁体放在桌子上同极相对时,它们会相互排斥。当两个同极距离足够远后,它们将停止移动。如果把一个磁体靠近第二个磁体,第二个磁体也会因同性相斥被推远。如果继续这样做,磁体将持续移动,这就是换向的线性示例。
有刷直流电机实行机械换向,这意味着电机的物理结构实际上会导致电机换向。电刷与换向器接触,随着电机旋转,电流通过电机线圈,将会使极性交替。这允许定子永磁体产生的磁场,始终与转子产生的磁场相反,因而总能产生力。机械换向表示有刷直流电机只需在电机绕组上施加一些电压即可旋转,如图 1所示。
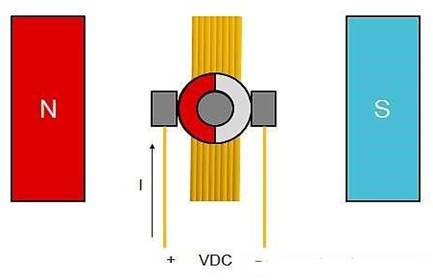
图 1. 有刷直流电机结构
很多读者在看到本文的标题后很可能正处于迷惑中,因为到现在为止我还没有谈及无刷直流电机。不过,为了解释“无刷”,我需要首先解释电刷用在什么地方。
无刷电机的起源从头来讲也是比较简单的:大部分有刷直流电机的问题都来自于电刷。电刷可能打火花、磨损、产生很强的噪音并产生很大一部分功耗,导致速度被严重限制,且不容易冷却。这意味着您不能在任何易燃物周围、需要长使用寿命、静音或高效率的应用条件下、在任何高速或高功耗系统中使用有刷直流电机。这都是电刷显著的缺点,取消电刷就可以解决这些问题,但是不好的地方是同时消除了机械换向。
缺乏机械换向会造成其它问题,因为电机需要换向。无刷电机使用电气换向,听起来很神奇吗?这种换向方式下,您需要确保电机中的电流始终产生一个可以移动转子的磁场。但是看看图 2,您需要先知道转子在哪里,才能考虑如何施加电流来移动转子。
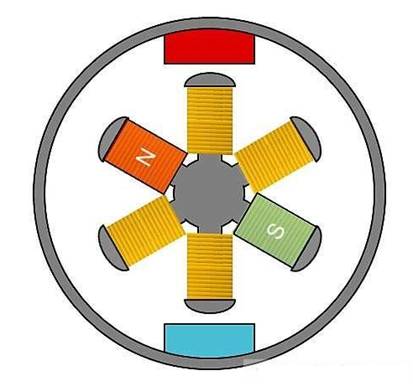
图 2.无刷直流电机结构
无刷直流电机系统的首个重大结构决策是“有传感器(sensored)”和“无传感器(sensorless)”之分。您需要知道转子在哪的话,有两种方法能帮助您:
•有传感器法,通常使用霍尔效应传感器或编码器,来探测转子的位置。虽然编码器可以给予非常准确的角度反馈,但这种方法成本很高。霍尔效应传感器是一种很受欢迎的磁传感器。在三相无刷直流电机中,部署三个霍尔效应传感器可以实现简单的六步换向。
•无传感器法,位置估计通常涉及测量或估计电机旋转时产生的逆电动势(EMF)。逆电动势是个复杂的话题,最好单独讲解。简言之,它是电机线圈上生成的电压,即电机速度及电机负载的函数。无传感器法的本质上是一种估计,通常需要进行复杂的计算。随着电机速度的下降(例如,对于位置控制的伺服电机),无传感器法将变得异常困难,这是因为逆电动势随速度下降。
无刷直流电机系统的第二个重大结构决策是控制方法。如果您知道转子在哪里,需要施加一定的电流来移动转子的话,三相无刷直流电机需要至少六个不同的电位。图 3是一张简图,您可以使用“梯形”、“六步”或“120度”的控制方法来找到无刷直流电机换向的方法。
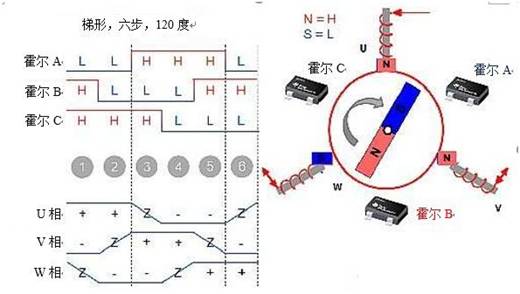
图 3. 有传感器梯形换向
另外一种方法是为电机施加更平滑的电流波形,这称之为“正弦波”控制或“180度”。与梯形控制相比,当与合适的电机配合使用时,这种控制方法能够提高效率,降低噪音。缺点是要实现平滑电压和电流分布,复杂性比较高,通常需要更准确的脉宽调制(PWM)计时器。
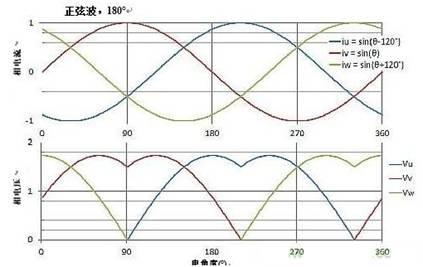
图4. 正弦波整流
在写这篇短文时,我很快就意识到这个主题其实非常宽泛。如磁场定向控制、电机启动、内转子与外转子、极数、Δ(Delta)与Y型绕组,以及许多细节本文无法一一述及。不过,我真心希望您能在读过后,在电机知识方面有所受益。
|
||||||||||||||||||||||||
|
||||||||||||||||||||||||