


从能耗角度来看,消费类电子产品和工业设备从传统的 AC 马达过渡到体积更小、更为高效的 BLDC 电机具有重大意义,但设计 BLDC 控制算法的复杂性阻止了工程师们实现这种过渡的积极性。
从手机中的小型振动马达到家用洗衣机和空调中使用的更复杂的马达,马达已成为消费领域中的日常装置。马达同样也是工业领域中的一个重要组成部分,在很多应用中广泛运用,如驱动风扇、泵等各种机械设备。这些马达的能量消耗是非常巨大的:研究表明,仅在中国,马达所消耗的能源占工业总能耗的 60% 至 70%,其中风扇和泵所消耗的能源占中国整体功耗的近四分之一。尽管这个数字在其他国家可能没那么高,但降低电子系统中的马达能耗已在全球成为必须优先考虑的议题。
一个多世纪以来,传统的交流 (AC) 马达已被广泛使用。交流马达是设计最简单的感应马达,但他们却造成了大量能源的浪费。这是因为交流马达只输出恒定速度,不能随工作条件的变化进行自适应。现在已有一些调节交流马达速度的简单方法(例如,可以提供三种速度选择的标准家用风扇),但这些方法的应用范围有限,而且难以转移到更为复杂的系统。
但对于直流 (DC) 马达,可以通过改变电压来改变和控制速度,从而根据应用需要来加快或减慢工作速度。这可以节省大量的能源,因为马达可以根据需要的条件来运行。在一般情况下,DC 马达比 AC 马达更有效率。
图一 : 用更小、更高效的 BLDC 马达代替传统的 AC 马达可以节约能源并降低成本,但 BLDC 控制所需的演算法非常复杂,以至於很多设计师都不愿进行转换。为 BLDC 马达控制而专门设计的专用 IC 可以令这项工作变得更为容易。

{kind=link}
BLDC马达的优势
DC 马达可被设计为有刷马达或无刷马达。无刷直流 (BLDC) 马达通常是大多数应用的最佳选择。这种马达更可靠、更安静,产生的电磁辐射更少,并且更为安全,因为它们消除了由于电刷和换向器而产生的火花。BLDC 马达体积更小、效率更高,这意味着它们需要使用更少的能源。
BLDC 马达的运行温度低于 AC 马达,更为高效的设计使得其内部零件产生的热量更少。 这不仅能够增加轴承系统的使用寿命,还能够提高电气系统及风机的可靠性。
此外,BLDC 马达的功率密度也高于 AC 马达。对于相同的能量输出,DC 马达的体积和重量都小于 AC 马达。这使得 BLDC 马达的运输和安装更为容易且成本更低。
不过,使用 BLDC 马达的麻烦之处在于系统需要更复杂的电子设备来管理马达。马达控制一向不是电子工程师的重点领域,许多开发人员因缺乏经验或专业知识而无法轻松设计出必要的控制电路。BLDC 马达的研发需要额外的时间和技术支持,这意味着需要更长的开发周期及更高的系统成本,这就使得系统制造商更难以从熟悉的 AC 马达过渡到 BLDC 马达。
然而,对于越来越多的制造商来说,使用 BLDC 马达产生的复杂性并不会随着市场对更节能家电需求的增加而有所抵销。 2011 年 IMS 调查显示,中国大约 40% 的空调采用了变频控制 BLDC 马达。这种情况呈上升趋势,并且,在某种程度上,得助于因专为 BLDC 马达控制而设计的专用电路。
无传感器磁场导向控制技术
用于控制 BLDC 马达的传统方法采用的是驱动定子的六步过程,由此在产生的转矩上产生脉动。所谓的「六步方波」过程采用霍尔效应传感器来检测 BLDC 马达中的永磁位置。
六步过程相对简单,但容易产生噪音,并且对于需要根据条件的变化快速改变马达转速的更先进应用来说,其响应能力不足。以洗衣机为例,负载根据所选择的洗涤周期有所不同,并且在整个周期过程中也有所变化。在滚筒式洗衣机中,这种情况更加复杂,当衣物旋转到滚筒顶端时,重力会对马达产生影响。
在这些情况下,需要一个更先进的算法。磁场导向控制 (FOC) 能够提供速度快速变化所需的响应时间,已成为当今更先进节能家电的马达控制方法选择。
有多种方式可以实现 FOC。其中一个方法是使用传感器(与六步方波过程方法类似),但传感器较难以安装和维护,尤其是在应用涉及复杂线束或马达暴露在水中时。实现 FOC 更简单、更具成本效益的方法是取消传感器。无传感器 FOC 涉及由永久磁铁在转子上产生的恒定转子磁场,是一种非常有效的控制方法。
FOC 方法可以让马达在全转速范围内顺利运转,在零速时产生最大转矩,并能够快速加速和减速。事实上,由于马达的尺寸小、成本和功耗低,无传感器 FOC 的诸多优势使其在对性能要求较低的应用中成为广受欢迎的选择。
特定应用解决方案
即便如此,实现无传感器 FOC 需要复杂的数学算法,这对于普通设计人员来说可能并不熟悉。在过去,设计师们通常依赖于复杂的数字讯号处理 (DSP) 芯片来实现无传感器 FOC。以英飞凌的FCM8531为例,它为工程师们提供了专门的解决方案,使得开发无传感器 FOC 应用变得更为容易。
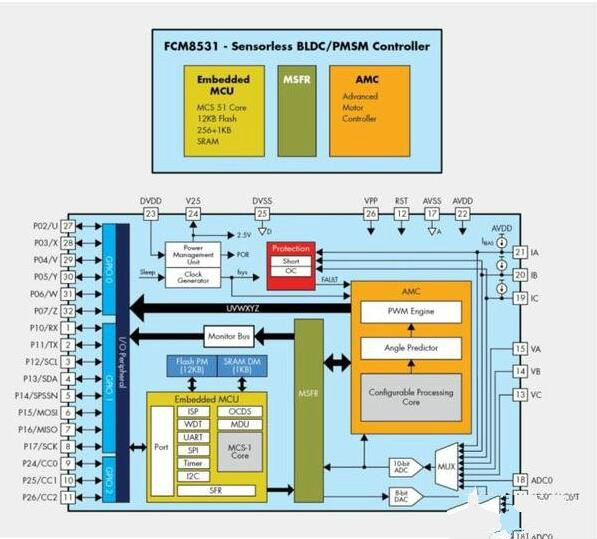
针对采用无传感器磁场导向控制 (FOC) 的系统,快捷半导体提供了一种配置有并行核心处理器的特定应用控制装置 FCM8531。 如图 1 所示,FCM8531 由一个先进马达控制器 (AMC) 处理器和一个 8 位兼容 80C51 的 MCU 处理器组成。
图二 : FOC马达控制 IC功能方块图(以FCM8531为例)
{kind=link}
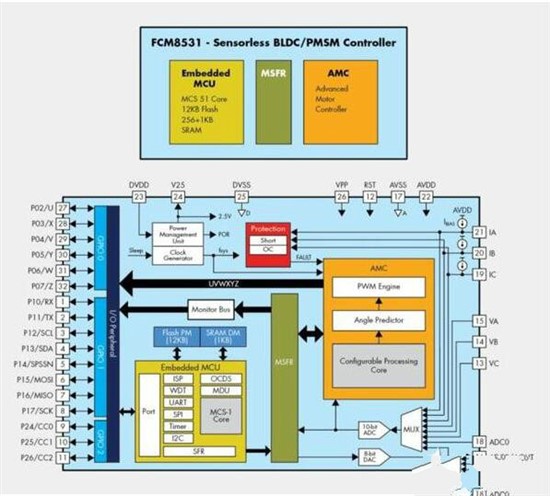
AMC 是一个专为马达控制而设计的核心处理器。它整合了一个可配置的处理核心处理器和外围电路,执行无传感器 FOC 马达控制。系统控制、用户接口、通信接口和输入/输出接口均可通过嵌入式 80C51 MCU来针对不同的马达应用进行程序设计。
FCM8531 的并行核心处理器的优势是,两个处理器可以独立工作,相互补充。 AMC 处理专门用于马达控制的任务,如马达控制算法、PWM 控制、电流检测、实时过电流保护和马达角度运算。 嵌入式 MCU 通过通讯接口向 AMC 提供马达控制命令,来执行马达控制活动。 复杂的马达控制算法在 AMC 中执行,因此,这种方法可减少软件负担,并简化控制系统程序。
我们为用户提供可用于开发软件、编译程序及进行实时调试的马达控制开发系统 (MCDS) IDE 和 MCDS 编程工具。设计人员可从函式库中选择适合的函式,快速编译程控功能和通讯协议,从而实现以前只能在高层次 DSP 上实现的效果。
结论
从能耗角度来看,消费类电子产品和工业设备从传统的 AC 马达过渡到体积更小、更为高效的 BLDC 马达具有重大意义,但设计 BLDC 控制算法的复杂性阻止了工程师们实现这种过渡的积极性。为 BLDC 马达控制而专门设计的专用 IC,如快捷半导体的 FCM8531,使开发人员更易于采用 BLDC 马达,有助于加快向更高效模式的过渡与转换。
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||