电机矢量控制的重要分析方法
发布时间:2017/9/21 13:12:00 来源:永阜康科技
在电机的运行中,是由电机定子和转子磁场同步旋转,建立的一个具有同步旋转速度的旋转坐标系,这个旋转坐标系就是常说的D-Q旋转坐标系。在该旋转坐标系上,所有电信号都可以描述为常数。为了方便电机矢量控制问题的研究,能否由仪器直接得到D-Q变换的结果呢?
D-Q变换是一种解耦控制方法,它将异步电动机的三相绕组变换为等价的二相绕组,并且把旋转坐标系变换成正交的静止坐标,即可得到用直流量表示电压及电流的关系式。D-Q变换使得各个控制量可以分别控制,可以消除谐波电压和不对称电压的影响,由于应用了同步旋转坐标变换,容易实现基波与谐波的分离。
由于直流电机的主磁通基本上唯一地由励磁绕组的励磁电流决定,所以这是直流电机的数学模型及其控制系统比较简单的根本原因。
如果能将交流电机的物理模型等效地变换成类似直流电机的模式,分析和控制就可以大大简化。坐标变换正是按照这条思路进行的。
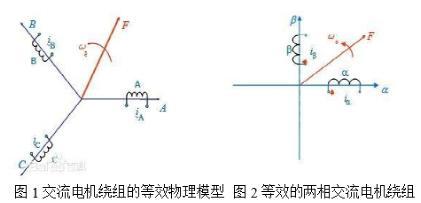
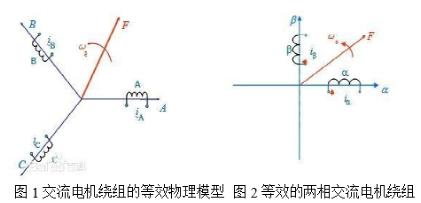
交流电机三相对称的静止绕组A 、B 、C ,通以三相平衡的正弦电流时,产生的合成磁动势是旋转磁动势F,它在空间呈正弦分布,以同步转速ws(即电流的角频率)顺着A-B-C的相序旋转。这样的物理模型绘于下图中。
旋转磁动势并不一定非要三相不可,除单相以外,二相、三相、四相、……等任意对称的多相绕组,通以平衡的多相电流,都能产生旋转磁动势,当然以两相最为简单。图2中绘出了两相静止绕组a和b它们在空间互差90°,通以时间上互差90°的两相平衡交流电流,也产生旋转磁动势F。
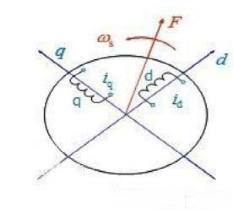
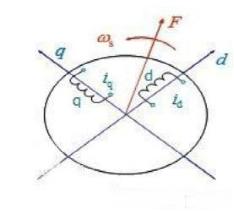
当图1和2的两个旋转磁动势大小和转速都相等时,即认为图2的两相绕组与图1的三相绕组等效。图3两个匝数相等且互相垂直的绕组d 和q,其中分别通以直流电流id和iq,产生合成磁动势F,其位置相对于绕组来说是固定的。如果让包含两个绕组在内的整个铁心以同步 转速旋转,则磁动势F自然也随之旋转起来,成为旋转磁动势。把这个旋转磁动势的大小和转速也控制成与图1 和图2中的磁动势一样,那么这套旋转的直流绕组也就和前面两套固定的交流绕组都等效了。
图3 旋转的直流绕组
由此可见,以产生同样的旋转磁动势为准则,图1的三相交流绕组、图2的两相交流绕组和图3中整体旋转的直流绕组彼此等效。或者说,在三相坐标系下的iA、iB 、iC,在两相坐标系下的ia、ib和在旋转两相坐标系下的直流id、iq是等效的,它们能产生相同的旋转磁动势。
D-Q坐标变换的应用
电机坐标变换理论在电气工程领域已经被广泛应用,不但在电机控制及瞬态分析方面被广泛应用,而且在电力系统故障分析以及电网电能质量的检测与控制等领域也被采用,电机坐标变换理论的应用主要有以下几方面。
1、电机控制
2、电机的瞬态运行分析
3、电机的故障诊断
测试方法
D-Q变换在电机测试中的应用非常广泛。只要能准确得到转子位置和准确测量三相信号的电流,使用高速的FPGA并行实现实时的算法运算,通过clark变换将相对定子静止的三相坐标系转换为相对定子静止的两相坐标系,得出对应的变换输出Iα和Iβ,然后使用park变换,将相对定子静止的两相坐标系转换为相对转子静止的两相坐标系从而算出ID和IQ。电机控制过程是反变换过程,首先设定励磁电流和转矩电流,然后变换到相对定子静止的两相,然后变换到相对定子静止的三相,从而实现对电机的控制。
目前ZLG致远电子正计划在功率分析仪中实现此D-Q变换功能,可以为电机控制提供参考,电机控制过程可以通过对比设定的值和功率分析仪测试的结果进行电机控制的研发设计,故障排查,算法优化等。
| |
| |
 |
您可能对以下产品感兴趣 |
 |
|
 |
| 产品型号 |
功能介绍 |
兼容型号 |
封装形式 |
工作电压 |
备注 |
| HR3992 |
HR3992是一种便于使用PWM来控制电流的双极微特步进电机驱动器, 输出驱动能力达到35V和±1.5A。内部固定关闭时间的PWM电流控制时序电路可以通过串行接口进行编程,使其工作在慢衰、快衰或混合衰减模式。 |
A3992 |
TSSOP-24 |
8V-35V/1.6A |
DMOS 全桥 PWM 微步进电机驱动芯片 |
| HR4982 |
HR4982是一种便于使用的内部集成了译码器的微特步进电机驱动器。其设计为能使双极步进电机以全、半、1/32和1/128步进模式工作。步进模式由逻辑输入MSx选择。输出驱动能力达到35V和±2A。HR4982包含一个工作在慢衰或混合衰减模式的固定关闭时间的电流调节器。 |
A4982 |
TSSOP-28 |
8V-35V/2A |
内置转换器和过流保护的微特步进电机驱动芯片 |
| HR4988 |
HR4988是一种便于使用的内部集成了译码器的微特步进电机驱动器。其设计为能使双极步进电机以全、半、1/4、1/8、1/16、1/32、1/64和1/128步进模式工作。步进模式由逻辑输入MSx选择。输出驱动能力达到35V和±2A。HR4988包含一个工作在慢衰或混合衰减模式的固
定关闭时间的电流调节器。 |
A4988 |
TSSOP-28/QFN-28 |
8V-35V/2A |
内置转换器和过流保护的微特步进电机驱动芯片 |
| HR8833 |
HR8833为玩具、打印机和其它电机一体化应用提供一种双通道电机驱动方案。HR8833有两路H桥驱动,可以驱动两路刷式直流电机,或者一个双极步进电机,或者螺线管或者其它感性负载。 |
DRV8833 |
TSSOP-16 |
2.70V-12.8V |
2A低电压双路刷式直流或单路双极步进PWM绕组电流调节/限制电机驱动器IC |
| HR5561 |
HR5561是应用于直流电机方案的单通道H桥驱动器芯片。
HR5561的H桥驱动部分采用低导通电阻的PMOS和NMOS功率管。低导
通电阻保证芯片低的功率损耗,使得芯片安全工作更长时间。此
外HR5561拥有低待机电流、低静态工作电流。这些性能使能HR5561
易用于玩具方案。 |
AT5561 |
SOP-8/DIP-8 |
1.8V-6.0V |
玩具单通道直流电机驱动器 |
| HR1084 |
HR1084是应用于直流电机方案的单通道H桥驱动器芯片。
HR1084的H桥驱动部分采用低导通电阻的PMOS和NMOS功率管。低导
通电阻保证芯片低的功率损耗,使得芯片安全工作更长时间。此
外HR1084拥有低待机电流、低静态工作电流。这些性能使能HR1084
易用于玩具方案。 |
DW1084 |
SOP-8/DIP-8 |
1.8V-6.0V/1A |
玩具单通道低电压1A直流电机驱动IC |
| HR4985 |
HR4985是一种便于使用的内部集成了译码器的微步进电机驱动器。其设计为使双极步进电机能够以全、半、1/4和1/8步进操作。步进模式由逻辑输入MSx选择。输出驱动能力达到35V和±1A。HR4985包括一个能够控制慢或混合衰减模式的电流调节器,其截止时间固定。 |
A4985 |
QFN-24 |
8V-35V/1.0A |
带转换器和过流保护的 DMOS 微步驱动器 |
| HR3988 |
HR3988是一款四路DMOS全桥驱动芯片,能够驱动多达2个步进电机或4个直流电机。每个全桥输出额定值高达36V, 1.2 A。 |
A3988 |
TQFP-48 |
8V-35V/1.2A |
四路DMOS全桥电机驱动芯片 |
| HR3979 |
HR3979是一种新近开发出来、专门用于双极步进电机的微步进电机驱动集成电路,能驱动马达以全、1/2、1/4及1/16步进操作,其内部集成了步进和直接译码接口、正反转控制电路、双H桥驱动,单路输出额定值达到35V、±2.5A。 |
A3979 |
TSSOP-28 |
8V-35V/2.5A |
带转换器的微步 DMOS 驱动器 |
| HR3967 |
HR3967是一种新近开发出来、专门用于双极步进电机的微步进电机驱动集成电路,能以全、1/2、1/4及1/8微步细分驱动马达,输出额定值能达到30V、±750mA 。 |
A3967 |
SOP-24 |
8V-35V/750mA |
内置转换器的微步进电机驱动芯片 |
|
| |