当前位置:首 页 --> 技术分享
MEMS陀螺仪工作原理
发布时间:2011/4/28 14:31:00 来源:



传统的陀螺仪主要是利用角动量守恒原理,因此它主要是一个不停转动的物体,它的转轴指向不随承载它的支架的旋转而变化。
但是MEMS陀螺仪(gyroscope)的工作原理不是这样的,因为要用微机械技术在硅片衬底上加工出一个可转动的结构可不是一件容易的事。MEMS陀螺仪利用科里奥利力——旋转物体在有径向运动时所受到的切向力。下面是导出科里奥利力的方法。有力学知识的读者应该不难理解。
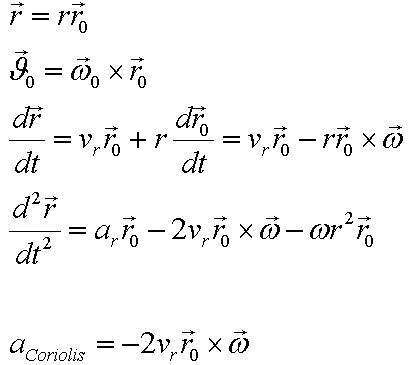
在空间设立动态坐标系(图一)。用以下方程计算加速度可以得到三项,分别来自径向加速、科里奥利加速度和向心加速度。
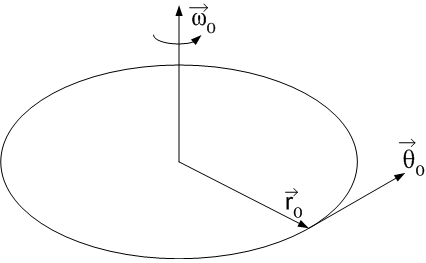
图一、动态坐标系
如果物体在圆盘上没有径向运动,科里奥利力就不会产生。因此,在MEMS陀螺仪的设计上,这个物体被驱动,不停地来回做径向运动或者震荡,与此对应的科里奥利力就是不停地在横向来回变化,并有可能使物体在横向作微小震荡,相位正好与驱动力差90度。(图二)MEMS陀螺仪通常有两个方向的可移动电容板。径向的电容板加震荡电压迫使物体作径向运动(有点象加速度计中的自测试模式),横向的电容板测量由于横向科里奥利运动带来的电容变化(就象加速度计测量加速度)。因为科里奥利力正比于角速度,所以由电容的变化可以计算出角速度。
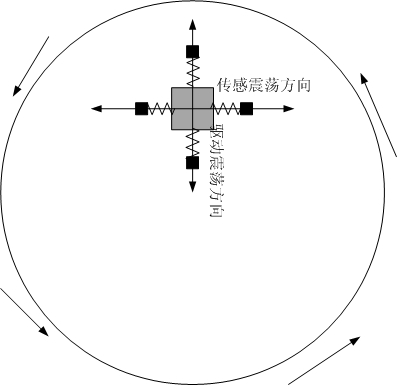
图二、MEMS陀螺仪的驱动和传感
图三是Z轴MEMS陀螺仪。它采用了闭合回路、数字输出和传感器芯片跟ASIC芯片分开平放连线的封装方法。
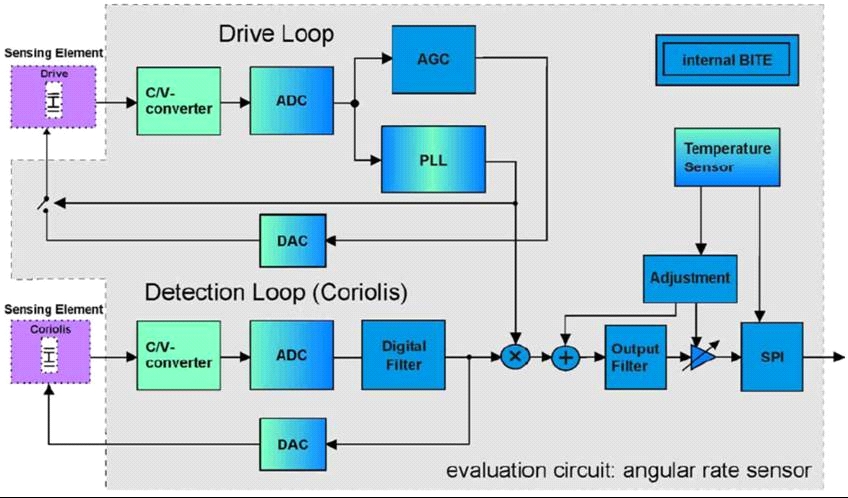
图三、BOSCH SMG 070原理图
|
||||||
|
||||||