


这篇文章将深入探讨无刷直流电动机,简称BLDC电动机。我们将详细了解其定义、工作原理、驱动方法以及广泛的应用领域。
BLDC电动机在现代驱动技术中占据了不可或缺的地位,其普及程度在家用电器、汽车工业、工业自动化等多个领域中日益提高。尽管在千瓦级以下的范围内,有刷直流电机曾一度占据主导地位,但随着电力电子和微处理技术的进步,小型无刷直流电动机在性价比方面取得了显著提升,从而逐渐扩大了其应用范围。
那么,什么是无刷(BLDC)电机呢?它类似于传统的有刷直流电动机,但核心区别在于换向方式。无刷电动机通过驱动电路将电流输入定子,实现电子换向,而无需使用物理电刷。与常规有刷直流电动机通过碳刷传输电流到转子不同,无刷电动机的电流是直接输送到定子线圈。这种设计不仅消除了碳刷带来的摩擦噪音和磨损问题,还显著延长了电机的使用寿命。
无刷直流电动机的构造与设计
无刷直流电动机与有刷电机之间的核心区别在于其换向方式。无刷电机摒弃了传统的机械换向器,转而采用电子开关电路进行换向。这种设计使得无刷直流电动机在本质上看似同步电动机,即定子和转子产生的磁场以相同的频率进行旋转。
无刷电机通常有三种不同的配置:单相、两相和三相,其中三相BLDC电机是应用最为广泛的一种。接下来,我们将深入探讨BLDC电机的内部构造,通过横截面图来详细了解其工作原理及各组成部分的功能。
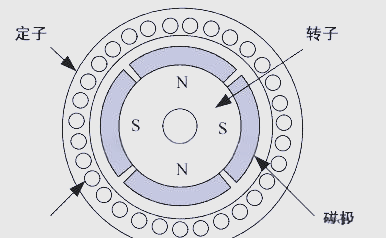
无刷电机的主要构成部分包括定子和转子。定子的结构类似于感应电动机,由硅钢片堆叠而成,并设有轴向切槽以便于绕线。值得注意的是,无刷电机中的绕组设计与传统感应电动机的绕组存在一定差异。

通常,BLDC电动机由三个定子绕组构成,它们以星形或“Y”形方式连接,且无中性点。此外,定子绕组还可根据线圈类型进一步划分为梯形电流驱动和正弦波电流驱动电动机。
在梯形电流驱动的电动机中,其驱动电流与反电动势均呈现出梯形波形,这与正弦波驱动电动机的波形特征有所不同。这类电动机常被应用于汽车和机器人技术领域,特别是混合动力汽车和机器人手臂,其额定电压通常为48V或以下。
再来看转子部分,电机的转子通常由永磁体构成,这些永磁体多为稀土合金磁体,例如钕(Nd)、钐钴(SmCo)以及钕铁氧体和硼的合金(NdFeB)。根据具体应用需求,转子的极数可能有所不同,通常在2到8个之间变化,且北极(N)和南极(S)会交替放置。下面展示了磁极的三种不同布置方式,其中最常见的是磁体被安置在转子的外周上。
第二种配置称为电磁嵌入式转子,其中矩形永磁体被嵌入转子的铁心中。在第三种情况下,磁体被直接插入转子的铁芯中。
位置传感器(霍尔传感器)
由于无刷电机中无电刷存在,其换向过程是通过电子控制实现的。为了使电动机能够顺畅旋转,必须按照特定顺序给定子绕组通电,而这个顺序的确定需要知道转子的实时位置,即转子的北极和南极的所在。
通常,霍尔传感器(基于霍尔效应原理工作)被用于检测转子的位置并将其转化为电信号。在大多数BLDC电机中,会使用三个霍尔传感器,它们被嵌入到定中以实时监测转子的位置变化。
霍尔传感器的输出电平(高或低)取决于转子北极的当前位置——是靠近南极还是北极。通过综合三个传感器的输出结果,可以精确确定哪一组定子绕组应该被通电。
工作原理概述
在理解无刷电机的工作原理时,我们可以想象定中设置了三个绕组:A、B和C。为了便于解释,我们用单个磁体来代替实际的转子进行演示。
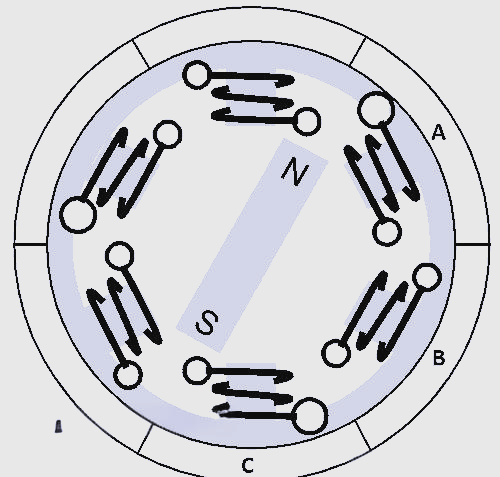
当电流通过线圈时,会产生磁场,而磁力线的方向则取决于电流的方向。利用这一原理,如果给线圈A通入电流,它会产生磁场并吸引转子磁铁,使转子磁铁沿顺时针方向略微偏移并与A对齐。接着,如果依次使电流流过线圈B和C,转子磁体将连续沿顺时针方向旋转。
为了提高效率,我们可以采用一种巧妙的方法:将单个线圈设计成相反的缠绕方式,从而产生双重吸引力。此外,若同时为两个线圈通电,一个线圈会吸引磁体,而另一个则会排斥磁体,这样能进一步提升效率。在此过程中,第三个线圈则保持空闲状态。
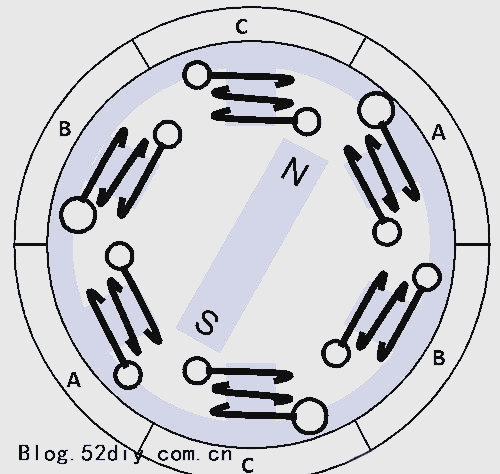
为了确保转子磁铁能够完成完整的360度旋转,我们可以灵活运用线圈A、B和C的六种不同组合,这些组合在以下的时序图中得到了清晰的展示。

根据前述时序图,我们可以清晰地看到,在任何时刻,总有一个相为正,一个相为负,而第三个相则处于空闲状态(或称浮动状态)。这种灵活的相序控制,结合霍尔传感器的输入,为我们提供了两个开关相位,从而实现对无刷直流电动机的精准驱动。
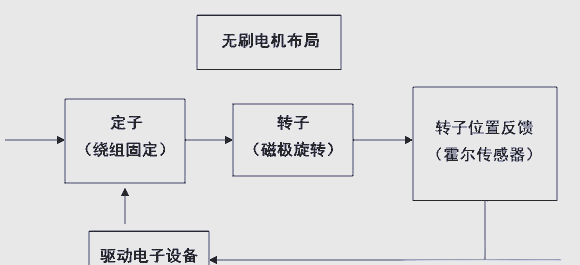
在无刷电机中,定子和转子扮演着核心角色,而驱动电路则是确保电动机顺畅运行的关键。典型的无刷直流电动机控制或驱动系统框图如下:
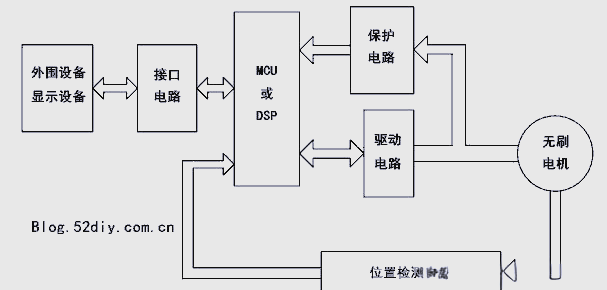
该驱动电路,常被称作电子速度控制器系统或简化为ESC,其中一种典型的配置为全桥驱动电路。它包含一个具备PWM输出的MCU,以及为定子绕组三相服务的六个MOSFET。此外,霍尔传感器的反馈和电源相关组件也是这一系统的重要组成部分。
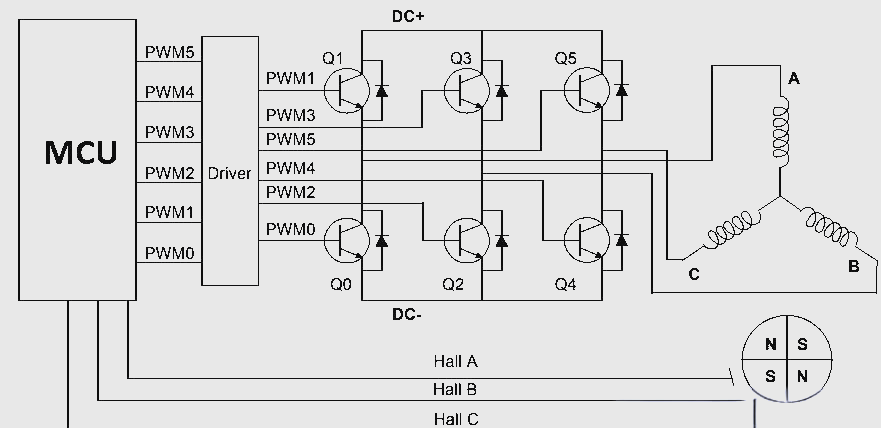
通过对MCU的编程,可以依据霍尔传感器提供的数据,实现对MOSFET的适时切换。
无刷电机的显著优势
无刷电动机通过电子换向来实现转向,相较于传统的有刷DC电动机,它具备以下显著优势:
- 无磨损(得益于无刷设计)
- 高效率
- 优异的速度与扭矩特性
- 耐用性更强
- 运行安静,噪音极低
- 转速更高
无刷直流电动机的应用广泛,涵盖多个领域。
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||